绳驱动仿人踝关节的机构设计与控制
学院(学生组织):机电学院梅科尔工作室
小发明创造
参与学生:钱磊、谭跃奎、姜宗品、李群涛、范国锋、王晨、张世界
项目简介:
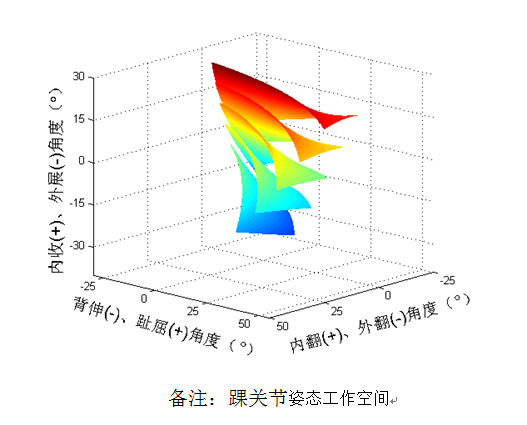
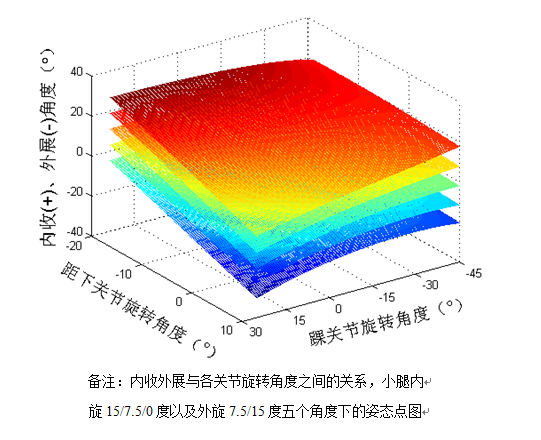
“绳驱动仿人踝关节的机构设计与控制”项目是由郑州轻工业学院梅科尔工作室的团队于2015年7月开启的创新项目。项目成员7人,面对现实生活中一些截止患者不能拥有正常人的行走功能,根据人体生理踝关节结构构造及运动功能特点,制作了一种仿人踝关节,该仿生踝关节机构构型是由三个旋转自由度构成。踝关节轴和距下关节轴不是简单的与膝关节轴平行或垂直的关系,而是倾斜交叉的位置关系,使得仿生踝关节的运动具有了人体踝关节的运动特点与功能。该设计中,踝关节轴和距下关节轴采用的是绳索的传动方式,具有了类似人体肌肉的缓冲减震的功能。该机构构型与绳索传动方式的设计不仅能够促进仿生假肢踝关节的发展,也可用于仿人机器人下肢设计。
项目成果:
项目运作至今,已经设计出了其三维模型,并且对其特有的机构构型建立了数学模型,进行了运动学仿真计算分析以及部分动力学仿真分析,并且在设计与分析基础上制作了样机模型。
项目荣誉:
获奖:
2015年郑州轻工业学院第十二届科技文化艺术节“挑战杯”大学生课外科技作品学术一等奖。
论文/专利:
[1] 陈鹿民,李一浩,王才东,王新杰,刘洁,钱磊,张世界. 一种三自由度仿人踝部关节装置.申请号:201510426066.1申请日期:2015.07.20
[2] 钱磊,李一浩,王才东,陈鹿民,王新杰.仿生踝关节及其弹性绳索传动机构的设计与实现[j],机械传动


 论文录用.pdf
论文录用.pdf